Works
VTOL Solution for Military UAV
Developed and configured a custom autopilot for a Vertical Take-Off and Landing (VTOL) solution tailored for the military UAV at Wake Engineering S.L., Madrid, Spain. Project spanned from 2022 to present, focusing on advanced UAV capabilities for military applications.
- Led engineering parameters of the flight controller for all vertical and quadplane and fixed-wing phases.
- Led flight instrument SW project for asynchronous real-time data logging from several sensors, including Tyto Motor, autopilot and aerodynamic sensors.
- Integrated and engineered several CAN subsystems.

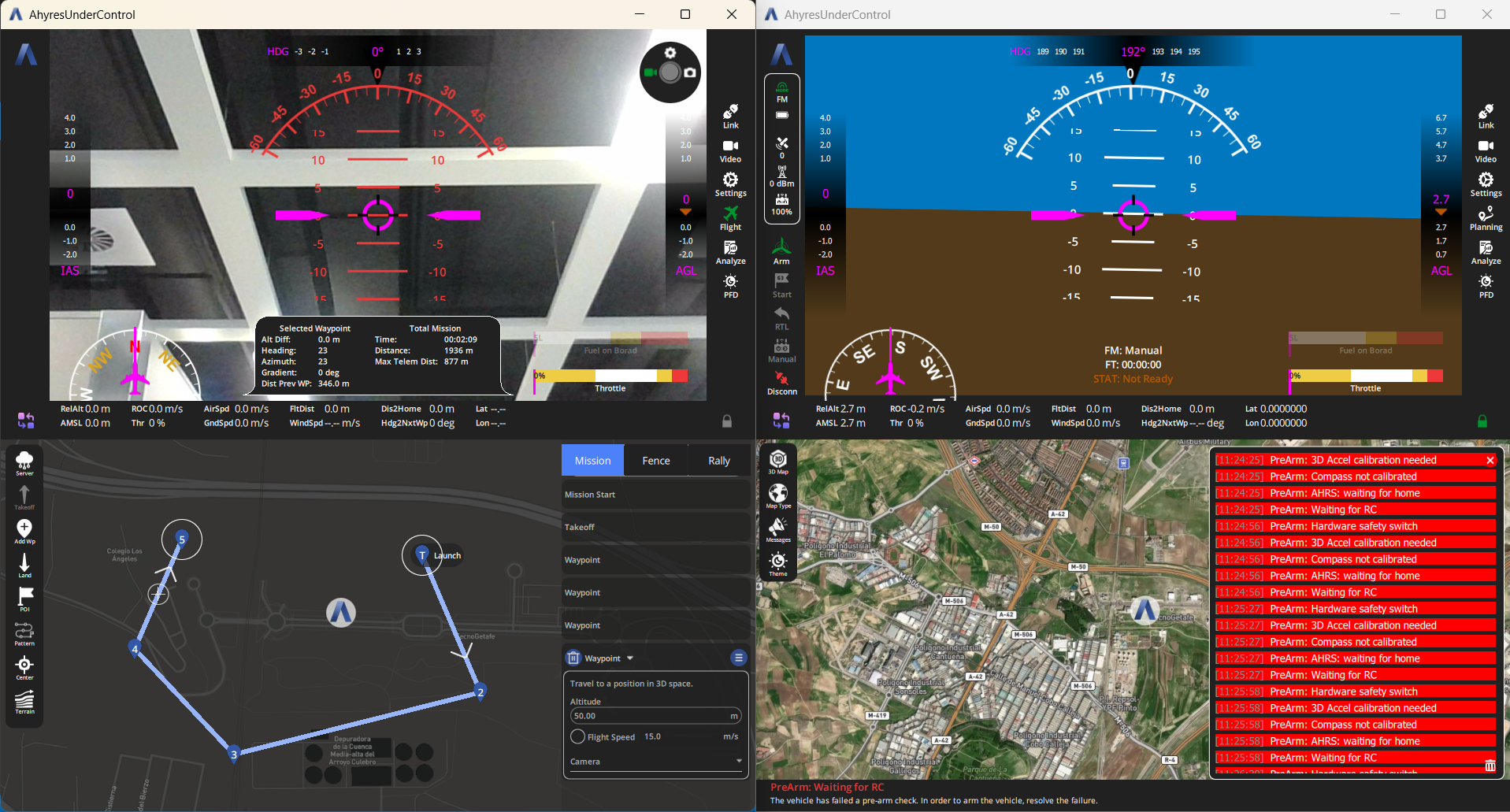
GCS SW for Inspection Missions
Designed a single-UAV GCS SW for online & offline server missions.
- Designed a QT compact portrait SW to hasten the control of UAV.
- Integrated 2D/3D maps for a better terrain monitoring.
- Developed an automated payload view, including HUD, instruments and video to speed up the mission.
- Integrated online/offline mdoes to download flight plans automatically from any servers.
Fixed-Wing Solution for Military Fulmar UAV
Configured UAV Navigation Vector-600 autopilot for a Fixed-Wing solution tailored for the military at Wake Engineering S.L., Madrid, Spain. Project spanned from 2014 to 2023, focusing on advanced UAV capabilities for military applications.
- Engineered resilient Serial/Ethernet communication system connecting avionics, GCS devices, antennas, and UAV using Silvus and Wavenet Radios.
- Led EUREKA SW project for ship targeting using UAV Gimbals with maritime navigation.
- Innovated Avionics Plugin with UAV Navigation for integration into Visionair software.

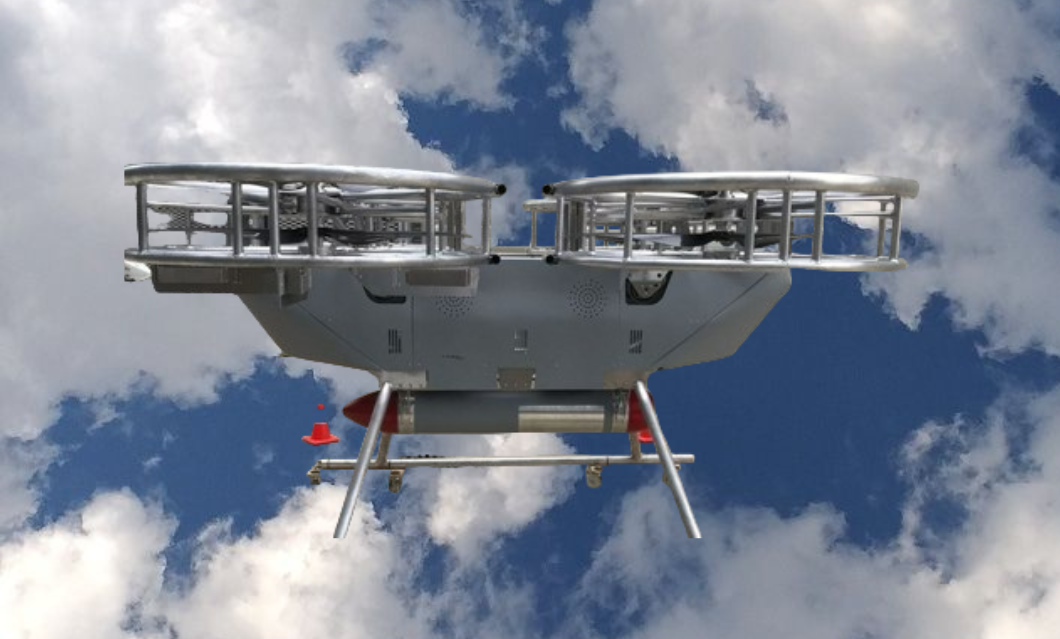
Wild Hopper: Heavy-Duty UAV for Firefighting
Designed and developed the Wild Hopper prototype, a heavy-duty UAV for day and night firefighting operations. Published in Heliyon (2022) and International Journal of Online and Biomedical Engineering (2021).
- Engineered a robust UAV capable of operating in challenging firefighting conditions.
- Collaborated with team to optimize day/night operational efficiency.

Heavy Hybrid-Electric Quadcopter with Flap Control
Mathematically modeled and designed a heavy hybrid-electric quadcopter controlled by flaps. Published in Unmanned Systems (2022).
- Designed innovative flap-based control system.
- Conducted aerodynamics analysis for hybrid-electric propulsion.
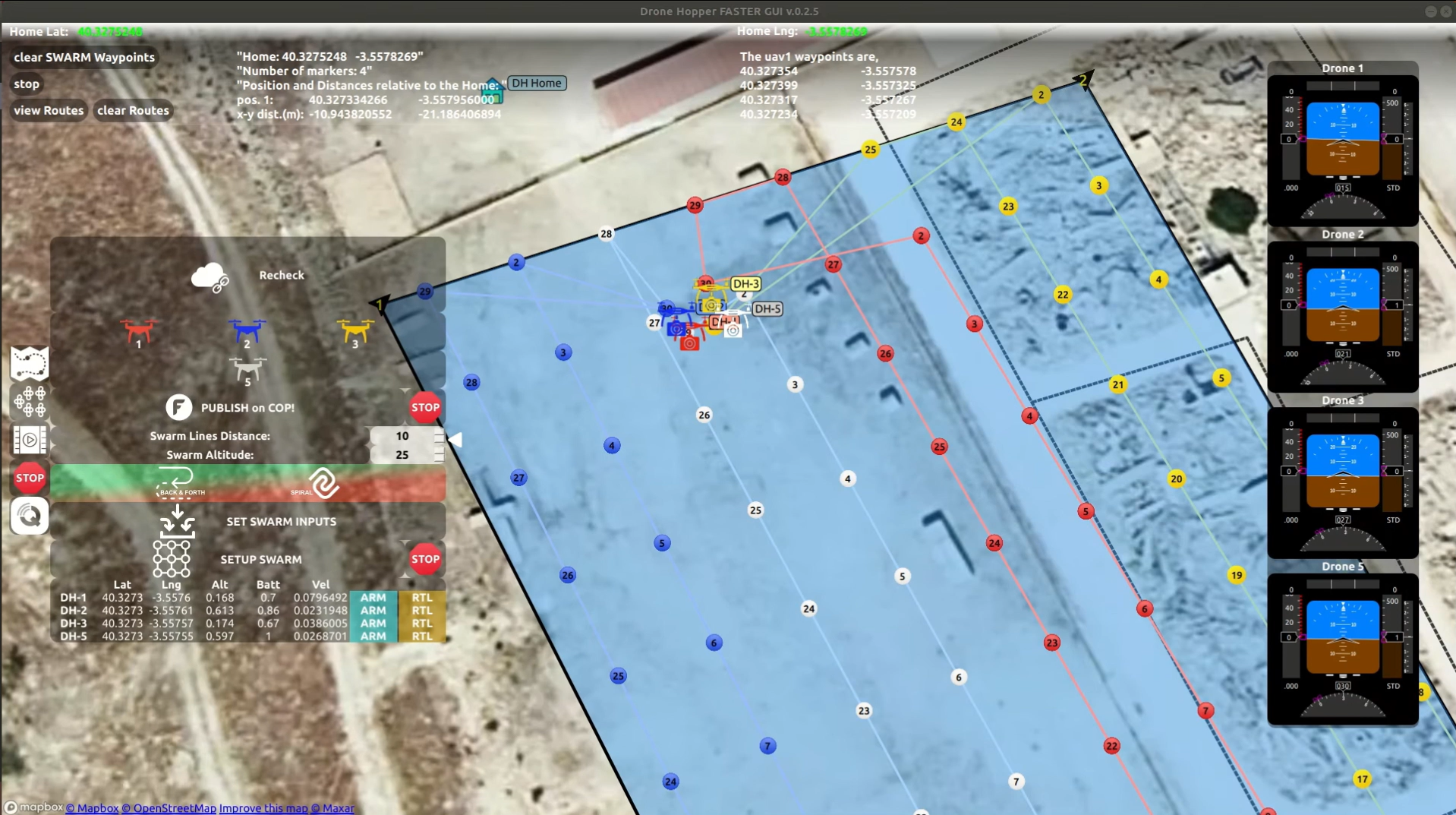
Modern GCS for Swarm Missions
Designed a fast multi-UAV path planning GCS SW for optimal area coverage in aerial sensing applications.
- Adapted algorithms for efficient multi-UAV coordination.
- Developed a QT based friednly UI for remote sensing operations.
- Developed ROS commands via SSH to handle multi-UAV opertaions, simultaneously.
Aerostack Autopilot for Quadcopter
Developed control and guidance systems for an autonomous quadcopter platform, based on Aerostack library.
- Developed control algorithms to stabilize vertical and attitude loops.
- Integrated and developed inddor positioning, using stereo cameras.
- Integrated an onbaord NVIDIA Jetson Nano to handle online image processing.
- Tested flights on various dynamic platforms at CVAR, UPM.
